안내
본문은 포럼의 4. 절연 감시 장치(IMD) 에서 읽으실 수 있습니다.
자작차 만들면서 다른 여러 팀의 학생분들과 익명 채팅방에서 큰 도움을 받았습니다. 귀중한 정보들이 일회성 답변으로 사라지는 것이 안타까워 모두가 정보를 공유하고 쉽게 검색해 찾아볼 수 있도록 익명 자작차 포럼을 만들었습니다.
포럼이 활성화되기를 바라는 차원에서 게시글을 전부 포럼으로 이동시켜 두었습니다. 읽고 나서 자유롭게 궁금한 점은 질문하시고, 아는 것은 공유해 주시면 앞으로 후배들에게 큰 도움이 될 것 같습니다. 감사합니다.
펼치기
### 목차
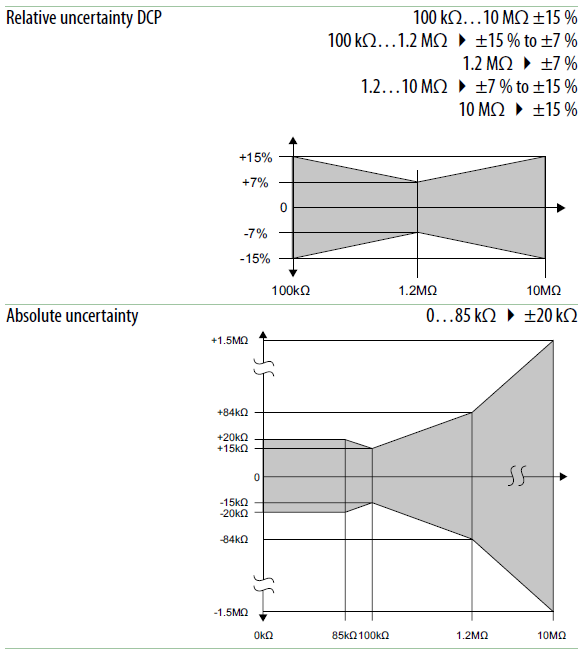
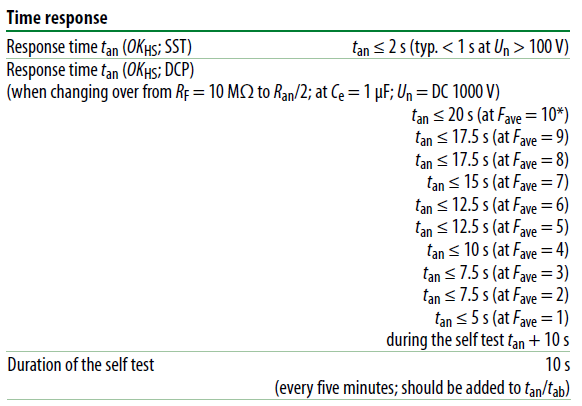
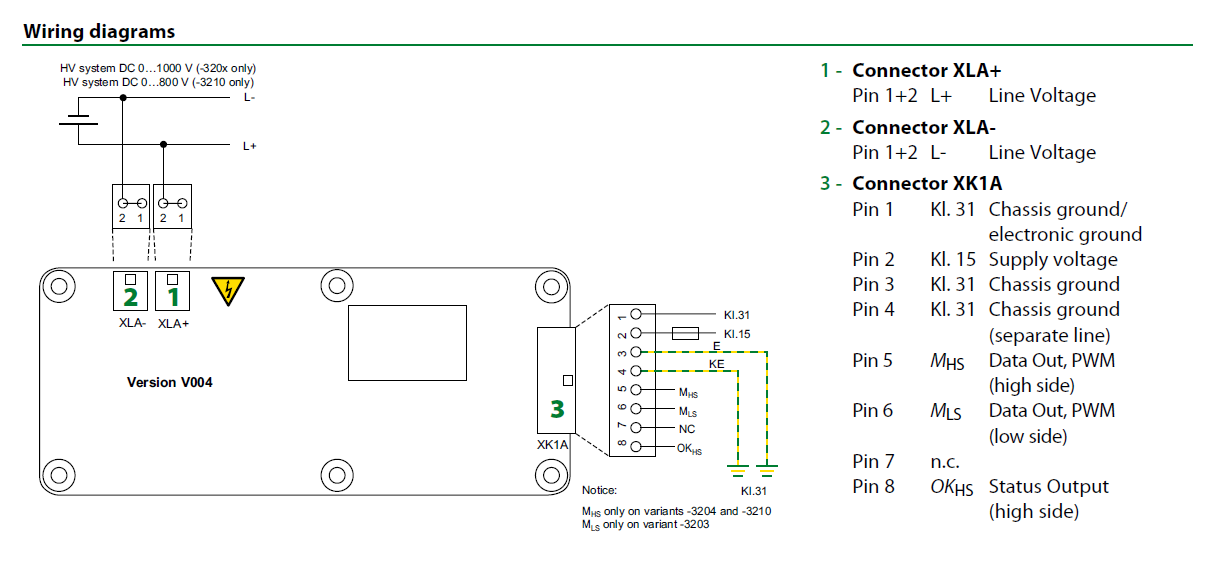
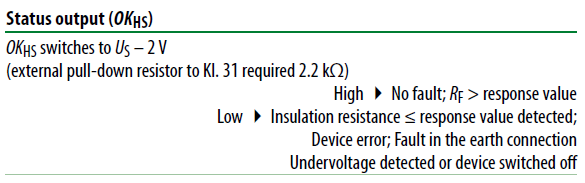
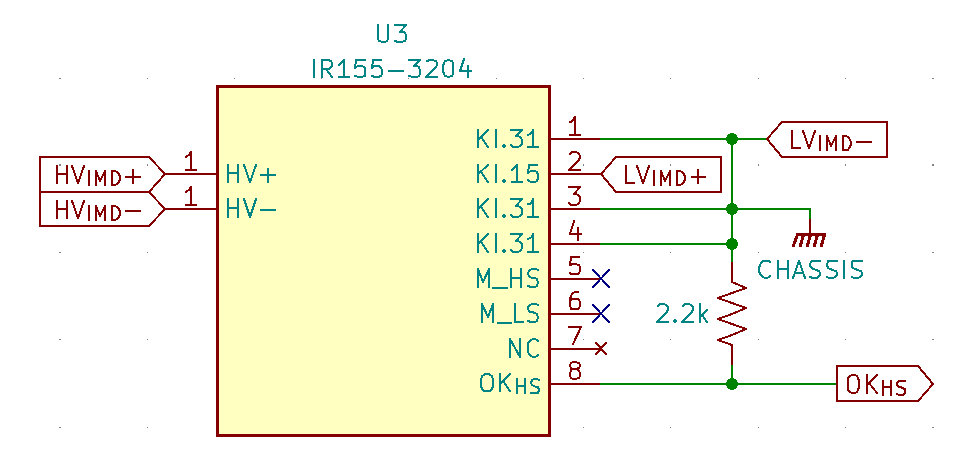
## 개요 IMD는 HV와 LV 계통 사이의 전기 절연 상태를 감시한다. 검차 시 차량기술규정 제 42조 절연 감시장치 검사(IMDT)에 따라 IMD 테스트를 진행한다. 내용을 요약하면 다음과 같다. * TSMP와 GLVMP 사이를 테스트 저항으로 연결한다 * 테스트 저항은 (구동시스템 최대 전압 * 250)(Ω) 로 한다. * IMD는 테스트 저항 연결 후 30초 내에 구동시스템을 차단해야 한다. 우리 팀의 구동시스템 최대 전압은 294V이므로, GLVMP와 HV +/-를 73.5kΩ로 연결하고 30초 내에 HV가 떨어지는지 시험하겠다는 것이다. IMDT는 배터리 검차, 전기시스템 검차, 우천 검사 직전 총 3회 실시하게 된다. 우리가 사용할 수 있는 IMD는 ISOMETER IR155-3203 또는 3204 모델로 정해져 있다. 3204 모델은 Undervoltage Detection이 꺼져 있고, 3203은 300V로 설정되어 있다. 어차피 사용하지 않는 기능이니 꺼져 있는 3204를 고르는 것을 추천한다. 그 밖에도 Measured value output이 high side인지 low side인지의 차이가 있는데, 우리는 어차피 이 출력을 사용하지 않고 OKHS 출력만을 사용하기 때문에 이것 또한 아무 상관이 없다.사진에 보이는 초록색 기판이 IMD이다. 그럼 이 IMD의 동작에 대해 보다 자세히 알아보자. ## IMD IMD는 Response Value(Ran) 설정값을 가지고 있다. 기본값은 100kΩ이며, 공급사로부터 지원받을 때 커스터마이징을 요청하면 100kΩ ~ 10MΩ 범위 내에서 설정할 수 있다. **IMD가 하는 일은 간단하다. HV와 LV 사이의 절연 저항이 이 Ran 값 밑으로 떨어질 때 FAULT 신호를 낸다.** **이 Ran 값은 반드시 차량의 구동시스템 전압에 맞는 값으로 설정되어야 한다.** 제품이 한 번 오면 우리가 Ran 을 바꿀 수 있는 방법은 없다. 즉, 공급사에 지원을 요청할 때부터 제대로 알고 계산해서 요청해야 한다는 뜻이다. ### Ran Ran에는 오차 범위가 정해져 있다.기본 설정값인 100kΩ에서 IMD는 최대 15%의 오차 범위가 존재한다. 즉, 85kΩ ~ 115kΩ가 Ran이 될 수 있다는 뜻이다. 한편, 규정에서 IMD 테스트 저항은 250Ω / V 이라고 했다. 이 저항으로 HV와 LV를 연결했을 때 IMD는 확실히 작동해야 한다. 우리 팀은 최대 294V를 사용하고 Ran 이 기본값인 100kΩ로 설정된 IMD를 사용한다. IMDT 저항은 위에서 계산한 대로 73.5kΩ이다. IMD의 Ran 이 오차 범위 최소값인 85kΩ일 때도, 최대값인 115kΩ일 때도 IMDT 저항은 항상 이 값보다 낮으므로 IMD는 반드시 동작할 것이다. 한편, 만약 우리 구동시스템 최대 전압이 600V이라고 가정해 보자. 규정에 의해 IMDT 저항은 150kΩ가 된다. Ran 이 기본 세팅된 값인 100kΩ인 IMD를 사용하면 이제 이 차량은 절대 IMDT를 통과할 수 없다. 절연 저항이 150kΩ인데 IMD는 아무리 후하게 쳐줘도 115kΩ 이상에서는 작동하지 않기 때문이다. 600V 구동시스템을 사용하려면 애초에 Ran 이 오차 범위 최소값에서도 항상 150kΩ가 넘도록 설정된 IMD를 사용해야 한다. Ran 이 250kΩ로 설정된 IMD를 사용하면 오차 범위는 대략 15%이므로 210kΩ 이하에서는 반드시 반응할 것이다. 즉, Ran 값을 너무 낮게 사용하면 IMD가 반응하지 않을 수도 있다. 반면, 너무 높게 사용하면 적절한 절연 저항을 유지하고 있는 상태에서도 IMD가 FAULT를 낼 수 있다. 위에 계산한 것처럼 적절한 수준의 Ran 값을 알아내 공급사에 요청해야 한다. ### Fave 한편, Fave 값은 절연 저항이 기준치 이하로 낮아졌을 때 IMD가 얼마나 빨리 반응해 OKHS 출력을 바꾸는지를 결정한다. 기본적으로 10으로 설정되어 있고, electric 및 hybrid vehicle에서 이 값을 권장한다고 한다.Fave = 10 일 때, IMD는 최대 20초 이내에 반응한다고 한다. 그러나 IMD는 self test, 즉 자가 진단을 수행한다. 자가 진단은 10초가 소요되고 매 5분마다 수행된다. 자가 진단 중에는 IMD가 절연 저항을 측정하지 않는 듯하다. 그러니 IMD가 작동하는 데는 최대 30초가 걸릴 수 있다. 최악의 시나리오는 검차장에서 IMD 테스트를 시작함과 동시에 IMD가 5분에 한 번 하는 자가진단을 시작하는 것이다. 그렇다면 규정상 최대 시간인 30초를 꽉 채워서 IMD가 작동할 수 있다. 그렇지 않고서야 대부분 20초 이내에 작동해야 한다. Fave = 10 이어도 사용하는데 아무 문제가 없다. ### OKHS IMD는 다음과 같이 연결한다.XLA+/-에는 각각 HV+/-를 연결해주면 된다. LV 커넥터인 XK1A에서는 1, 2, 3, 4, 8번 핀만 사용한다. 1번과 2번 핀은 LV 전원 핀이다. 각각 LV-, LV+를 연결해주면 된다. 3, 4번 핀은 섀시 그라운드와 연결해주어야 하는데, 우리는 LV-를 차체에 접지해서 사용해야 하므로 이 또한 그냥 LV-와 연결해주면 된다. 4번 핀에 separate line이라는 언급이 있는데, 크게 신경쓰지 않아도 되는 듯하다. 그냥 3, 4번 핀을 커넥터를 통해 각각 GND와 연결했더니 잘 작동했다. 오히려 한 전선은 차량 뒷부분 프레임에, 다른 하나는 앞부분 프레임에 연결했을 때 동작이 더 불안했다. 우리가 사용할 FAULT 신호는 OKHS 이다. 이 신호는 다음과 같이 출력된다.우선 공급 전압보다 2V 낮은 전압이 HIGH로 출력된다. 또한, 별도로 섀시 그라운드에 2.2k 풀다운 저항을 연결해 주어야 한다. 정상 상태일 때는 HIGH가 출력되고, 절연 저항이 Ran 보다 낮거나 장치에 오류가 났을 때 등 문제 상황에서는 LOW가 출력된다. 종합해 보면, IMD는 다음과 같이 배선해야 한다.이렇게 출력된 OKHS 신호로 어떻게 IMD 래칭 릴레이를 제어할 것인지는 차단 회로에서 다룰 것이다. ### 목차